
5.4.6 Differential working principle
The differential consists of (see Figure 5.35) half-axle gears [1], satellites [2], the spider pin [3] (which can be cruciform, if there are four of them) and the differential casing [4]. Semi-axial bevel gears are fixed on the inner ends of the half shafts [5], on the outer ends of which the drive wheels are attached. Satellites that are small bevel gears, fit loosely on the axis.
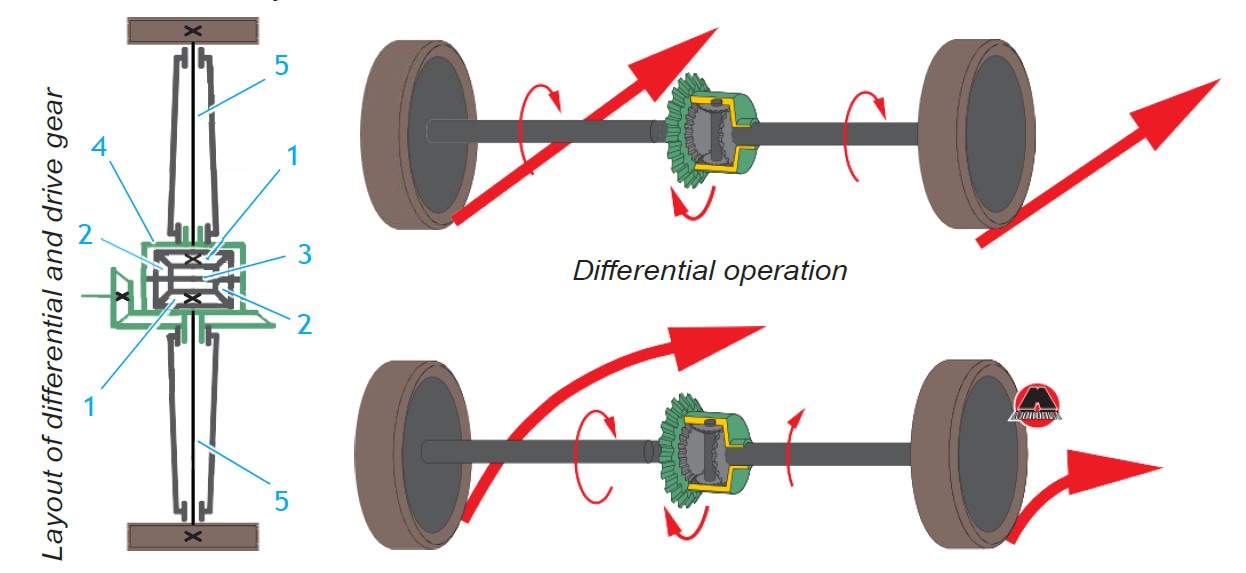
Figure 5.35 Differential flow chart.
When the car moves around a turn, the inner wheel travels a shorter distance and, due to traction, starts rotating more slowly. In this case, the satellites that are rotating, start rolling along the axle shaft gear of the inner wheel that has slowed down its rotation. As a result, the satellites start rotating about their axes, increasing the number of revolutions of the second axle shaft gear and the outer wheel, respectively.
Note
In case of availability of a differential between the number of wheel revolutions, there is a certain relationship in which the sum of the wheel revolutions is always equal to twice the number of revolutions of the differential box. That is, when the number of revolutions of one wheel decreases, the number of revolutions of the other wheel increases by the same amount. In case of a stationary differential box, if one of the wheels rotates, the other wheel will rotate in the opposite direction.















2 MB